
ALAD
Automatizované programování 9osého robota
Řešení pro automatizované plánování trajektorie svařování plastových nádrží v robotické buňce s 9 stupni volnosti.
Služba propojuje CAD/CAM data, plánovací algoritmus, kolizní model buňky a export výsledného řídicího programu pro reálné nasazení. Cílem bylo převést náročné programování robota z ruční přípravy na funkční, testovaný a opakovatelný proces.
Plánování trajektorie
AI a optimalizace
Robotické svařování
Od ručního programování k funkčnímu plánování trajektorie
Na trhu chyběla robotická buňka, která by dokázala automaticky plánovat svařovací trajektorii i pro složitější tvary nádrží. Běžně dostupná řešení byla zaměřená spíše na ručně předdefinované svary nebo jednodušší geometrii.
Cílem proto nebylo jen nasadit existující algoritmus, ale upravit jej pro reálného 9osého robota, doplnit potřebné pomocné nástroje a vytvořit testovaný proces, který bude použitelný v praxi.
Výsledkem je funkční řetězec zpracování od dat z CAD/CAM prostředí přes plánování trajektorie až po export výsledného programu pro řízení robotické buňky.
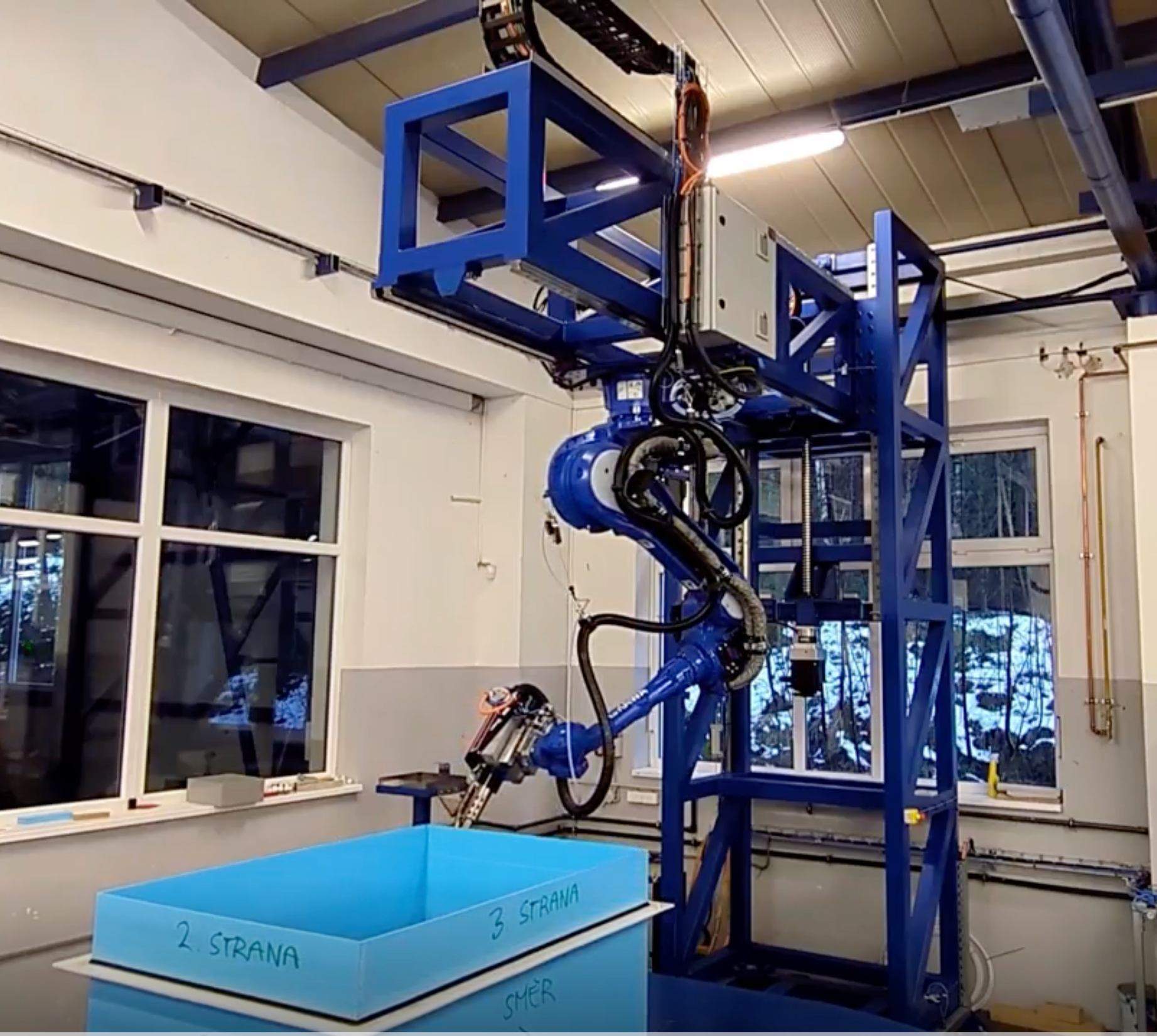
Video ukázka řešení
Ukázka automatizovaného programování robotické buňky
Jak řešení funguje
Vstup z CAD/CAM
Proces začíná návrhem nádrže a svarů v CAD/CAM prostředí. Pro plánování jsou důležité zejména model nádrže a popis svaru exportovaný například ve formě G-code.
Plánování trajektorie
Algoritmus pracuje s modelem buňky, kinematikou robota, limity kloubů a kolizním prostředím. Využívá optimalizační a AI přístupy pro hledání proveditelné a bezpečné trajektorie.
Testování a validace
Součástí řešení jsou i nástroje pro testování plánovacího softwaru, databáze modelů a svarů a evidence výsledků. To umožňuje ověřovat hraniční situace a průběžně zlepšovat spolehlivost.
Výstup pro reálnou výrobu
Výsledná trajektorie se exportuje jako řídicí program pro řídicí systém robotické svařovací buňky. Tím se propojuje návrh výrobku, algoritmické plánování a praktické nasazení ve výrobě.
Co bylo součástí řešení
Nešlo jen o nasazení hotového softwaru, ale o rozvoj stávajícího přístupu tak, aby byl použitelný pro konkrétní robotickou buňku a výrobní scénář.
Vznikly podpůrné nástroje pro testování, organizaci běhů a vyhodnocení výsledků jednotlivých plánovacích kroků.
Řešení zohledňuje geometrii nádrže, svarů i celé robotické buňky, aby bylo možné plánovat v proměnlivém a prostorově omezeném prostředí.
Cílem není jen analytický výstup, ale prakticky využitelný řídicí program pro řízení svařovacího pracoviště.
Použité principy
optimalizace
kolizní kontrola
kinematika robota
limity pohybu
testovací databáze
export programu
Co klient získal
Funkční řetězec od návrhu ke svařování
Služba přinesla prakticky otestované propojení dat z návrhu nádrže s plánováním a výrobním výstupem pro robotickou buňku. Tím se zásadně zkracuje cesta od zadání k výrobě.
Lepší zvládání složitých geometrií
Řešení je navržené pro víceosý robot a komplikované kolizní prostředí výrobků. To rozšiřuje možnosti automatizace i tam, kde by ruční programování bylo zdlouhavé nebo obtížně škálovatelné.
Základ pro další nasazení
Praktická implementace vytvořila základ pro další nasazení svařovacích buněk i pro další zákazníky a příbuzné výrobní aplikace, například v dalších typech svařování nebo řezání.
Typické přínosy v praxi
- omezení ruční přípravy programů pro robotické svařování
- vyšší opakovatelnost plánování a jednodušší přenos do výroby
- lepší práce se složitější geometrií nádrží a svarů
- možnost systematického testování a vyhodnocování plánovacích scénářů
- silnější základ pro škálování řešení na další zákazníky nebo podobné procesy
- propojení vývoje algoritmu s reálným průmyslovým nasazením
Chcete-li o službě vědět více, kontaktujte nás
Rádi s vámi probereme, jak lze obdobné plánování trajektorie a automatizované programování robota využít i ve vašem výrobním procesu.